ここでは、内部座標の定義とその微分の式を記す。
数式の notation
・ベクトルの下付き添字の2つのアルファベットは
 などのような意味となる。
などのような意味となる。
・単位ベクトルとして
 などの表記を用いる。
などの表記を用いる。
・成分の表記として
 or
or
 などの表記を用いる。
などの表記を用いる。
結合長
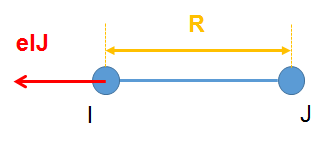
・定義

・微分

・微分の導出
○  での微分
での微分

よって、

○  での微分
での微分

結合角
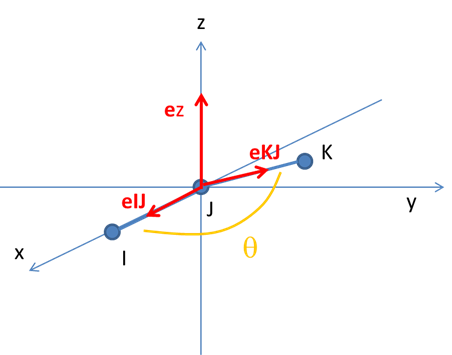
・定義

・微分

ここで、
-

|
|
(1)
|
-

|
|
(2)
|
-

|
|
(3)
|
-

|
|
(4)
|
・微分の導出
○ での微分

構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \frac{ \partial \cos \theta }{ \partial x_{i} } &= \frac{ \partial }{ \partial x_{i} } \left( \frac{ \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} | } \right) (\because \theta の定義) \\ &= \frac{ \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{i} } \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} | } + \frac{ \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} | } \frac{ \partial }{ \partial x_{i} } \frac{1}{ | \mathbf{r}_{ij} | }(\because \mathbf{r}_{ij} のみが \mathbf{r}_{i} に依存) \\ &= \frac{ x_{kj} }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} | } + \frac{ \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} | } \left( - \frac{1}{ | \mathbf{r}_{ij} |^2 } \right) \frac{ x_{ij} }{ | \mathbf{r}_{ij} | } \\ &= \frac{ | \mathbf{r}_{ij} |^2 x_{kj} - ( \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} ) x_{ij} }{ | \mathbf{r}_{ij} |^3 | \mathbf{r}_{kj} | } = \frac{ ( \mathbf{e}_{kj} )_{x} - ( \mathbf{e}_{ij} \cdot \mathbf{e}_{kj} ) ( \mathbf{e}_{ij} )_{x} }{ | \mathbf{r}_{ij} | } \\ \end{align}}
構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \therefore \frac{ \partial \cos \theta }{ \partial \mathbf{r}_{i} } &= \frac{ | \mathbf{r}_{ij} |^2 \mathbf{r}_{kj} - ( \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} ) \mathbf{r}_{ij} }{ | \mathbf{r}_{ij} |^3 | \mathbf{r}_{kj} | } = \frac{ \mathbf{e}_{kj} - ( \mathbf{e}_{ij} \cdot \mathbf{e}_{kj} ) \mathbf{e}_{ij} }{ | \mathbf{r}_{ij} | } \\ &= \frac{ \mathbf{e}_{kj} - \cos \theta \mathbf{e}_{x} }{ | \mathbf{r}_{ij} | } (\because \theta の定義) \\ &= \frac{ \sin \theta \mathbf{e}_{y} }{ | \mathbf{r}_{ij} | } (\because (4)より ) \\ &= \frac{ \sin \theta ( \mathbf{e}_{z} \times \mathbf{e}_{x} ) }{ | \mathbf{r}_{ij} | } (\because (3)より ) \\ \end{align}}
(この変形中で 3, 4 を用いた。)
よって、

○  での微分
での微分
i と k を入れ替えれば、 と等価だから、
と等価だから、

○ での微分

二面角
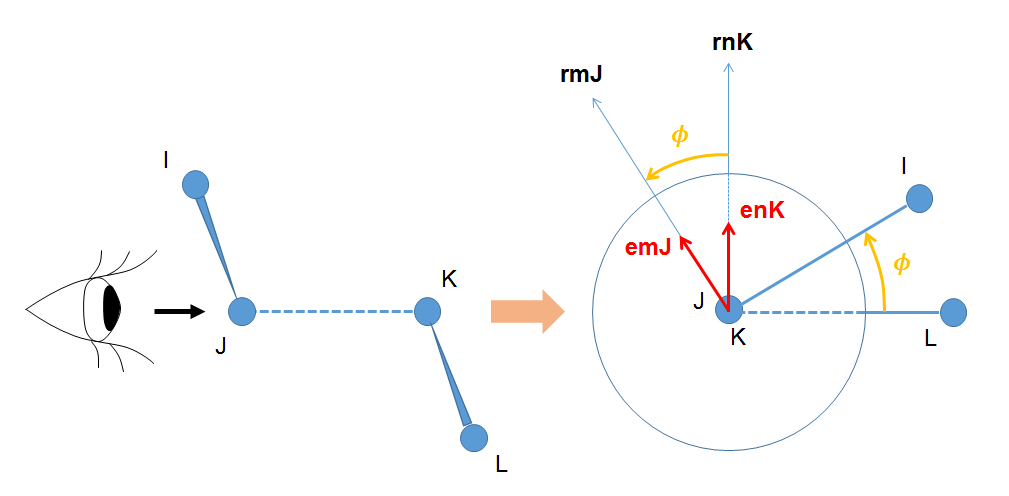
・定義
![{\displaystyle
\phi = \mbox{sign} [ ( \mathbf{r}_{mj} \times \mathbf{r}_{nk} ) \cdot \mathbf{r}_{kj} ] \times \arccos \left( \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } \right)
}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d7a68c161f66f6cf49587ffcbff110570dbef611)
・微分

ここで、
-

|
|
(5)
|
-

|
|
(6)
|
-

|
|
(7)
|
-

|
|
(8)
|
・微分の導出
○ での微分

構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \frac{ \partial \cos \phi }{ \partial x_{i} } &= \frac{ \partial }{ \partial x_{i} } \left( \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } \right) (\because \phi の定義 ) \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{i} } \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } + \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{nk} | } \frac{ \partial }{ \partial x_{i} } \frac{1}{ | \mathbf{r}_{mj} | } (\because \mathbf{r}_{mj} のみが \mathbf{r}_{i} に依存) \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{i} } \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } + \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{nk} | } \left( - \frac{1}{ | \mathbf{r}_{mj} |^2 } \right) \frac{ \partial | \mathbf{r}_{mj} | }{ \partial x_{i} } \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{i} } \cdot \mathbf{e}_{nk} - \cos \phi \frac{ \partial | \mathbf{r}_{mj} | }{ \partial x_{i} } }{ | \mathbf{r}_{mj} | } \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{i} } \cdot \mathbf{e}_{nk} - \cos \phi \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{i} } \cdot \mathbf{e}_{mj} }{ | \mathbf{r}_{mj} | } (\because (9)より) \\ &= \frac{ - \sin \phi \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{i} } \cdot ( \mathbf{e}_{mj} \times \mathbf{e}_{kj} ) }{ | \mathbf{r}_{mj} | } (\because (8)より) \\ &= - \sin \phi \frac{ \left( \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{i} } \times \mathbf{r}_{kj} \right) \cdot ( \mathbf{e}_{mj} \times \mathbf{e}_{kj} ) }{ | \mathbf{r}_{mj} | } (\because (5)より) \\ &= - \sin \phi \frac{ \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{i} } \cdot [ \mathbf{r}_{kj} \times ( \mathbf{e}_{mj} \times \mathbf{e}_{kj} ) ] }{ | \mathbf{r}_{mj} | } (\because スカラー三重積(10)より) \\ &= - \sin \phi \frac{ \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{i} } \cdot [ ( \mathbf{r}_{kj} \cdot \mathbf{e}_{kj} ) \mathbf{e}_{mj} - ( \mathbf{r}_{kj} \cdot \mathbf{e}_{mj} ) \mathbf{e}_{kj} ] }{ | \mathbf{r}_{mj} | } (\because ベクトル三重積(11)より) \\ &= - \sin \phi \frac{ | \mathbf{r}_{kj} | \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{i} } \cdot \mathbf{e}_{mj} }{ | \mathbf{r}_{mj} | } (\because \mathbf{r}_{kj} \perp \mathbf{e}_{mj}) \\ &= - \sin \phi \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{mj} | } ( \mathbf{e}_{mj} )_{x} \\ \end{align}}
(この変形中で 5, 8, 9, 10, 11 を用いた。
-

|
|
(9)
|

-

|
|
(10)
|
-

|
|
(11)
|
)

よって、

○  での微分
での微分
i と l , k と j , m と n を入れ替えれば、 と等価だから、 →
→  の変換の際の符号に気をつけて
の変換の際の符号に気をつけて

○ での微分

構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \frac{ \partial \cos \phi }{ \partial x_{j} } &= \frac{ \partial }{ \partial x_{j} } \left( \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } \right) (\because \phi の定義) \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{j} } \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } + \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{nk} | } \frac{ \partial }{ \partial x_{j} } \frac{1}{ | \mathbf{r}_{mj} | } + \frac{ \frac{ \partial \mathbf{r}_{nk} }{ \partial x_{j} } \cdot \mathbf{r}_{mj} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } + \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | } \frac{ \partial }{ \partial x_{j} } \frac{1}{ | \mathbf{r}_{nk} | } (\because \mathbf{r}_{mj}, \mathbf{r}_{nk} 共に \mathbf{r}_{i} に依存) \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{j} } \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } + \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{nk} | } \left( - \frac{1}{ | \mathbf{r}_{mj} |^2 } \right) \frac{ \partial | \mathbf{r}_{mj} | }{ \partial x_{j} } + \frac{ \frac{ \partial \mathbf{r}_{nk} }{ \partial x_{j} } \cdot \mathbf{r}_{mj} }{ | \mathbf{r}_{mj} | | \mathbf{r}_{nk} | } + \frac{ \mathbf{r}_{mj} \cdot \mathbf{r}_{nk} }{ | \mathbf{r}_{mj} | } \left( - \frac{1}{ | \mathbf{r}_{nk} |^2 } \right) \frac{ \partial | \mathbf{r}_{nk} | }{ \partial x_{j} } \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{j} } \cdot \mathbf{e}_{nk} - \cos \phi \frac{ \partial | \mathbf{r}_{mj} | }{ \partial x_{j} } }{ | \mathbf{r}_{mj} | } + \frac{ \frac{ \partial \mathbf{r}_{nk} }{ \partial x_{j} } \cdot \mathbf{e}_{mj} - \cos \phi \frac{ \partial | \mathbf{r}_{nk} | }{ \partial x_{j} } }{ | \mathbf{r}_{nk} | } \\ &= \frac{ \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{j} } \cdot \mathbf{e}_{nk} - \cos \phi \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{j} } \cdot \mathbf{e}_{mj} }{ | \mathbf{r}_{mj} | } + \frac{ \frac{ \partial \mathbf{r}_{nk} }{ \partial x_{j} } \cdot \mathbf{e}_{mj} - \cos \phi \frac{ \partial \mathbf{r}_{nk} }{ \partial x_{j} } \cdot \mathbf{e}_{nk} }{ | \mathbf{r}_{nk} | } (\because (9), (12)より) \\ &= \frac{ - \sin \phi \frac{ \partial \mathbf{r}_{mj} }{ \partial x_{j} } \cdot ( \mathbf{e}_{mj} \times \mathbf{e}_{kj} ) }{ | \mathbf{r}_{mj} | } + \frac{ \sin \phi \frac{ \partial \mathbf{r}_{nk} }{ \partial x_{j} } \cdot ( \mathbf{e}_{nk} \times \mathbf{e}_{kj} ) }{ | \mathbf{r}_{nk} | } \\ &= - \sin \phi \frac{ \left( \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{j} } \times \mathbf{r}_{kj} + \mathbf{r}_{ij} \times \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \right) \cdot ( \mathbf{e}_{mj} \times \mathbf{e}_{kj} ) }{ | \mathbf{r}_{mj} | } + \sin \phi \frac{ \left( \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \times \mathbf{r}_{kl} \right) \cdot ( \mathbf{e}_{nk} \times \mathbf{e}_{kj} ) }{ | \mathbf{r}_{nk} | } (\because (7), (8)より) \\ &= - \sin \phi \frac{ \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{j} } \cdot [ \mathbf{r}_{kj} \times ( \mathbf{e}_{mj} \times \mathbf{e}_{kj} ) ] - \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \cdot [ \mathbf{r}_{ij} \times ( \mathbf{e}_{mj} \times \mathbf{e}_{kj} ) ] }{ | \mathbf{r}_{mj} | } + \sin \phi \frac{ \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \cdot [ \mathbf{r}_{kl} \times ( \mathbf{e}_{nk} \times \mathbf{e}_{kj} ) ] }{ | \mathbf{r}_{nk} | } (\because スカラー三重積(10)より) \\ &= - \sin \phi \frac{ \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{j} } \cdot [ ( \mathbf{r}_{kj} \cdot \mathbf{e}_{kj} ) \mathbf{e}_{mj} - ( \mathbf{r}_{kj} \cdot \mathbf{e}_{mj} ) \mathbf{e}_{kj} ] - \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \cdot [ ( \mathbf{r}_{ij} \cdot \mathbf{e}_{kj} ) \mathbf{e}_{mj} - ( \mathbf{r}_{ij} \cdot \mathbf{e}_{mj} ) \mathbf{e}_{kj} ]}{ | \mathbf{r}_{mj} | } + \sin \phi \frac{ \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \cdot [ ( \mathbf{r}_{kl} \cdot \mathbf{e}_{kj} ) \mathbf{e}_{nk} - ( \mathbf{r}_{kl} \cdot \mathbf{e}_{nk} ) \mathbf{e}_{kj} ] }{ | \mathbf{r}_{nk} | } (\because ベクトル三重積(11)より) \\ &= - \sin \phi \left( \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{mj} |^2 } \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{j} } \cdot \mathbf{r}_{mj} - \frac{ \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} |^2 } \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{mj} |^2 } \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \cdot \mathbf{r}_{mj} \right) + \sin \phi \frac{ \mathbf{r}_{kl} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} |^2 } \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{nk} |^2 } \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{j} } \cdot \mathbf{r}_{nk} (\because \mathbf{r}_{kj} \perp \mathbf{e}_{mj}, \because \mathbf{r}_{ij} \perp \mathbf{e}_{mj}) \\ &= - \sin \phi \left( \frac{ \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} |^2 } \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{mj} |^2 } ( \mathbf{r}_{mj} )_{x} - \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{mj} |^2 } ( \mathbf{r}_{mj} )_{x} \right) - \sin \phi \frac{ \mathbf{r}_{kl} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} |^2 } \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{nk} |^2 } ( \mathbf{r}_{nk} )_{x} \\ &= - \sin \phi \left( \frac{ \mathbf{r}_{ij} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} |^2 } - 1 \right) \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{mj} |^2 } ( \mathbf{r}_{mj} )_{x} - \sin \phi \frac{ \mathbf{r}_{kl} \cdot \mathbf{r}_{kj} }{ | \mathbf{r}_{kj} |^2 } \frac{ | \mathbf{r}_{kj} | }{ | \mathbf{r}_{nk} |^2 } ( \mathbf{r}_{nk} )_{x} \\ \end{align}}
(この変形中で 7, 8, 9, 10, 11, 12 を用いた。
-

|
|
(12)
|
)

よって、

○ での微分
i と l , k と j , m と n を入れ替えれば、 と等価だから
と等価だから

面外角(Wagging angle)
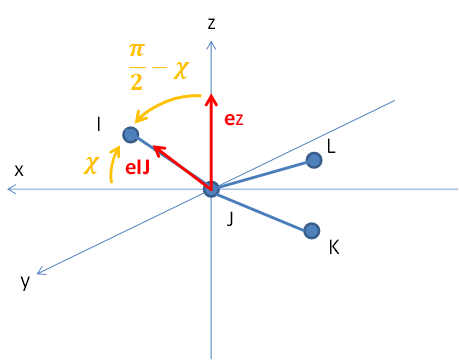
・定義

・微分

ここで、
-

|
|
(13)
|
-

|
|
(14)
|
-

|
|
(15)
|
-

|
|
(16)
|
・微分の導出
○ での微分

構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \frac{ \partial \sin \chi }{ \partial x_{i} } &= \frac{ \partial }{ \partial x_{i} } \left( \frac{ \mathbf{r}_{ij} \cdot ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \right) (\because \chi の定義) \\ &= \frac{ \frac{ \partial \mathbf{r}_{ij} }{ \partial x_{i} } \cdot ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } + \frac{ \mathbf{r}_{ij} \cdot ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \frac{ \partial }{ \partial x_{i} } \frac{1}{ | \mathbf{r}_{ij} | } (\because \mathbf{r}_{ij} のみが \mathbf{r}_{i} に依存) \\ &= \frac{ ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} )_{x} }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } + \frac{ \mathbf{r}_{ij} \cdot ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \left( - \frac{1}{ | \mathbf{r}_{ij} |^2 } \right) \frac{ x_{ij} }{ | \mathbf{r}_{ij} | } \\ &= \frac{ ( \mathbf{e}_{z} )_{x} - ( \mathbf{e}_{ij} \cdot \mathbf{e}_{z} ) ( \mathbf{e}_{ij} )_{x} }{ | \mathbf{r}_{ij} | } \\ \end{align}}
構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \therefore \frac{ \partial \sin \chi }{ \partial \mathbf{r}_{i} } &= \frac{ \mathbf{e}_{z} - ( \mathbf{e}_{ij} \cdot \mathbf{e}_{z} ) \mathbf{e}_{ij} }{ | \mathbf{r}_{ij} | } \\ &= \frac{ ( \mathbf{e}_{ij} \times \mathbf{e}_{z} ) \times \mathbf{e}_{ij} }{ | \mathbf{r}_{ij} | } (\because ベクトル三重積(17)より) \\ &= \frac{ ( [ \sin \chi \mathbf{e}_{z} + \cos \chi \mathbf{e}_{x} ] \times \mathbf{e}_{z} ) \times \mathbf{e}_{ij} }{ | \mathbf{r}_{ij} | } (\because (16)より) \\ &= \frac{ - \cos \chi ( \mathbf{e}_{y} \times \mathbf{e}_{ij} ) }{ | \mathbf{r}_{ij} | } \\ \end{align}}
(この変形中で 16, 17 を用いた。
-

|
|
(17)
|
)
よって、

○ での微分

構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \frac{ \partial \sin \chi }{ \partial x_{k} } &= \frac{ \partial }{ \partial x_{k} } \left( \frac{ \mathbf{r}_{ij} \cdot ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \right) (\because \chi の定義) \\ &= \frac{ \mathbf{r}_{ij} \cdot \left( \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{k} } \times \mathbf{r}_{lj} \right) }{ | \mathbf{r}_{ij} | | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } + \frac{ \mathbf{r}_{ij} \cdot ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{ij} | } \frac{ \partial }{ \partial x_{k} } \frac{1}{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } (\because \mathbf{r}_{kj} のみが \mathbf{r}_{k} に依存) \\ &= \frac{ \mathbf{e}_{ij} \cdot \left( \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{k} } \times \mathbf{r}_{lj} \right) }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } + \mathbf{e}_{ij} \cdot ( | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | \mathbf{e}_{z} ) \left( - \frac{1}{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} |^2 } \right) \frac{ \partial | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | }{ \partial x_{k} } (\because (13)より) \\ &= \frac{ \frac{ \partial \mathbf{r}_{kj} }{ \partial x_{k} } \cdot ( \mathbf{r}_{lj} \times \mathbf{e}_{ij} ) }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } + ( \mathbf{e}_{ij} \cdot \mathbf{e}_{z} ) | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | \left( - \frac{1}{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} |^2 } \right) \frac{ | \mathbf{r}_{lj} |^2 x_{kj} - ( \mathbf{r}_{kj} \cdot \mathbf{r}_{lj} ) x_{lj}}{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } (\because (10),(18) より) \\ &= \frac{ ( \mathbf{r}_{lj} \times \mathbf{e}_{ij} )_{x} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } - \sin \chi \left( \frac{ | \mathbf{r}_{lj} |^2 x_{kj} - ( \mathbf{r}_{kj} \cdot \mathbf{r}_{lj} ) x_{lj} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} |^2 } \right) (\because \chi の定義) \\ \end{align}}
(この変形中で 10, 13, 18 を用いた。
-

|
|
(18)
|

)
構文解析に失敗 (不明な関数「\begin{align}」): {\displaystyle \begin{align} \therefore \frac{ \partial \sin \chi }{ \partial \mathbf{r}_{k} } &= \frac{ \mathbf{r}_{lj} \times \mathbf{e}_{ij} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } - \sin \chi \left( \frac{ | \mathbf{r}_{lj} |^2 \mathbf{r}_{kj} - ( \mathbf{r}_{kj} \cdot \mathbf{r}_{lj} ) \mathbf{r}_{lj} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} |^2 } \right) \\ &= \frac{ \mathbf{r}_{lj} \times \mathbf{e}_{ij} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } - \sin \chi \left( \frac{ \mathbf{r}_{lj} \times ( \mathbf{r}_{kj} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} |^2 } \right) (\because ベクトル三重積(11)より) \\ &= \frac{ \mathbf{r}_{lj} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \times \left( \mathbf{e}_{ij} - \sin \chi \frac{ \mathbf{r}_{kj} \times \mathbf{r}_{lj} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \right) (\because (13)より) \\ &= \frac{ \mathbf{r}_{lj} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \times ( \mathbf{e}_{ij} - \sin \chi \mathbf{e}_{z} ) \\ &= \frac{ \mathbf{r}_{lj} }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \times ( \cos \chi \mathbf{e}_{x} ) \\ &= - \cos \chi \frac{ ( \mathbf{e}_{x} \times \mathbf{r}_{lj} ) }{ | \mathbf{r}_{kj} \times \mathbf{r}_{lj} | } \\ \end{align}}
よって、

○ での微分
k と l を入れ替えれば、 と等価だから、符号に気をつけて
と等価だから、符号に気をつけて

○ での微分




